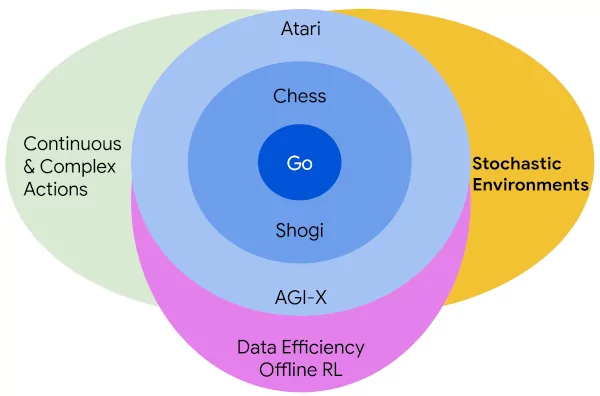
After extending to arbitrary action spaces and offline RL, we recently published our next step in generalizing MuZero: [cached]Stochastic MuZero, which learns and plans with a stochastic model of the environment that can model not only a single deterministic outcome of our actions, but rather a full set of possibilities.
Previous approaches such as AlphaZero and MuZero have achieved very good results in fully-observed deterministic environments, but this type of environment is insufficiently general to model many problems and real world tasks. Beyond the stochasticity inherent in many domains (think roll of the dice or draw of the cards …